
28/10/12
Hasil Implementasi dan Pembahasan
Posted on 23.02 by Unknown
Perancangan Sistem
Sistem yang dirancang menggunakan lengan robot ROB3 sebagai basisnya. Lengan robot ROB3 digerakkan oleh enam buah motor DC. Posisi sudut setiap poros diketahui melalui potensiometer. Sebagai penggerak motor dirancang rangkaian driver yang tersusun atas IC L293D serta driver yang tersusun atas transistor







Untai ADC
Untai ADC digunakan untuk mengubah keluaran potensiometer menjadi data digital serta untuk mengubah keluaran penyesuai isyarat tranduser ultrasonik menjadi data digital. IC ADC0809 memiliki delapan kanal input analog. Enam kanal input ADC0809 digunakan untuk potensiometer dan satu kanal input digunakan untuk keluaran tranduser ultrasonik. Proses pengaksesan kanal ADC dilakukan satu persatu secara bergantian sesuai kebutuhan. Pengendalian ADC oleh mikrokontroler dilakukan melalui sinyal READ, WRITE serta CS.
Sistem Minimal AT89C51
Mikrokontroler AT89C51 mempunyai tugas mengendalikan seluruh sistem. Mikrokontroler juga bertugas menerima program dalam format heksadesimal dari komputer dan menyimpannya di RAM eksternal. Sistem minimal mikrokontroler dilengkapi dengan PPI 8255 untuk menambah port keluaran. Mikrokontroler
Sistem yang dirancang menggunakan lengan robot ROB3 sebagai basisnya. Lengan robot ROB3 digerakkan oleh enam buah motor DC. Posisi sudut setiap poros diketahui melalui potensiometer. Sebagai penggerak motor dirancang rangkaian driver yang tersusun atas IC L293D serta driver yang tersusun atas transistor
darlington TIP 120 dan TIP 125. Untuk membangkitkan frekuensi ultrasonik digunakan rangkaian multivibrator dari IC 555. Gelombang pantulan yang diterima oleh transduser penerima mengalami proses penyesuaian isyarat melalui untai penguat, penyearah serta filter. Keluaran untai penyesuai isyarat serta keluaran potensiometer diubah menjadi digital oleh IC ADC0809. Mikrokontroler menggunakan data-data tersebut untuk menentukan bentuk gerakan serta kecepatan gerakan yang dilakukan oleh robot. Setiap motor digerakkan oleh isyarat Pulse Width Modulation yang dihasilkan Mikrokontroler. Gambar 1 menunjukkan skema lengan robot ROB3. Gambar 2 menunjukkan diagram kotak sistem pengendalinya.

Pemancar Gelombang Ultrasonik
Pemancar gelombang ultrasonik disusun oleh sebuah transduser ultrasonik yang diberi gelombang kotak dengan frekuensi sekitar 40 KHz. Gelombang kotak dihasilkan oleh untai multivibrator yang disusun oleh IC 555 yang bekerja secara astable. Rangkaian pemancar ultrasonik ditunjukkan gambar 3.

Penerima Gelombang Ultrasonik
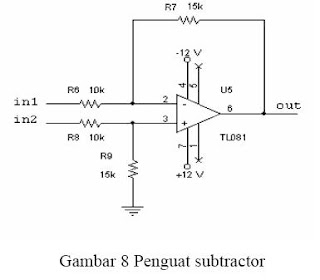
Metode pengukuran jarak halangan yang digunakan adalah dengan mengukur kekuatan sinyal pantulan. Gelombang pantulan ditangkap dengan sebuah transduser penerima. Transduser penerima mengeluarkan isyarat sinus yang amplitudonya tergantung dari jarak halangan dengan transduser. Untai penerima Gelombang ultrasonik berfungsi memperkuat, menyearahkan serta menapis keluaran transduser penerima sebelum dikirim ke ADC. Penyearahan isyarat dilakukan oleh untai penyearah presisi yang dibantu dengan dua buah untai buffer serta sebuah penguat subtractor untuk memperoleh penyearahan gelombang penuh. Untai penyesuai isyarat akan memberikan penguatan total sekitar 150 kali dan jarak halangan terjauh yang masih terdeteksi adalah sekitar 100 cm. Gambar 4 menunjukkan blok diagram penyesuai isyarat.

Penguat inverting bertugas sebagai penguat pertama dengan nilai penguatan sekitar 46 kali. Untai penyearah presisi yang dirancang memiliki penguatan sekitar 2 kali. Untai pengurang mempunyai penguatan 1,5 kali. Untai filter pelewat rendah orde dua dirancang memiliki nilai frekuensi cut-off sekitar 60 Hz untuk menyesuaikan dengan kebutuhan. Keluaran untai penyesuai isyarat adalah isyarat DC yang siap diubah menjadi digital. Gambar 5 sampai dengan 9 masing-masing menunjukkan untai penguat inverting, penyearah presisi, buffer, penguat subtractor serta filter yang digunakan dalam penelitian ini.





Untai ADC
Untai ADC digunakan untuk mengubah keluaran potensiometer menjadi data digital serta untuk mengubah keluaran penyesuai isyarat tranduser ultrasonik menjadi data digital. IC ADC0809 memiliki delapan kanal input analog. Enam kanal input ADC0809 digunakan untuk potensiometer dan satu kanal input digunakan untuk keluaran tranduser ultrasonik. Proses pengaksesan kanal ADC dilakukan satu persatu secara bergantian sesuai kebutuhan. Pengendalian ADC oleh mikrokontroler dilakukan melalui sinyal READ, WRITE serta CS.
Sistem Minimal AT89C51
Mikrokontroler AT89C51 mempunyai tugas mengendalikan seluruh sistem. Mikrokontroler juga bertugas menerima program dalam format heksadesimal dari komputer dan menyimpannya di RAM eksternal. Sistem minimal mikrokontroler dilengkapi dengan PPI 8255 untuk menambah port keluaran. Mikrokontroler
membangkitkan sinyal PWM untuk menggerakkan motor serta sinyal-sinyal pengendali ADC dan driver motor. Mikrokontroler menerima data digital dari ADC0809 yang berasal dari sensor potensiometer dan transduser ultrasonik.
Langganan:
Posting Komentar (Atom)


No Response to "Hasil Implementasi dan Pembahasan"
Komentar Anda