
27/10/12
Mekanik Robot
Posted on 01.21 by Unknown
Pembaca yang belum pernah memulai sebuah proyek robot dapat dikatakan sebagai orang eksperimen robotika. Ketika seoarang eksperimen robotika berinisiatif mempelajari dan membuat sebuah robot, maka diharapkan robot yang dibuat sedapat mungkin seperti yang dibayangkan. Untuk alasan flesibilitas, robot yang dibuat sebaiknya dapat dibongkar pasang sehingga dapat ditambah terus kemampuannya dan semakin disempurnakan. Pada bagian ini kita akan mempelajari sistem gerak robot, material yang dapat dipakai untuk kontruksi robot, kemudian rancang bangun kontruksi robot.
Sistem Gerak
Robot berdasarkan mobilitasnya terbagi dalam dua kelompok:
stationary robot biasanya berwujut manipulator lengan yang menyerupai fungsi dari lengan manusia. seperti pada salah satu robot pada industri perakitan mobil. jenis pola gerakan lengan robot antra lain polar coordinate, cylindrical coordinate, cartesian coordinate dan revolute coordinate.

Polar coordinate memiliki pola jangkauan setengah bola, dengan titik pergeseran sejauh jari-jari bola.
 Polar coordinate
Polar coordinate
yang mana r=panjang lengan Dan θ=sudut
Cartesian coordinate titik2 yang dijangkau oleh lengan dengan pola yang menyerupai kotak dan tidak dapat melakukan rotasi
 Cartesian coordinate
Cartesian coordinate
cylindrical coordinate lengan robot terpasang pada sistem yang menyerupai elevator, bergerak naik turun, dapat berotasi, menjangkau tempat dengan berbagai variasi ketinggian.
 Cylindrical coordinate
Cylindrical coordinate
Revolute coordinate mendekati model lengan pada manusia, dapat berotasi, bergerak naik turun, fleksibel mencapai titik yang dikehendaki.
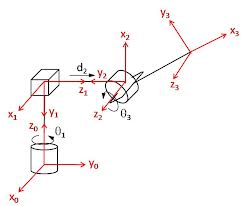 Revolute coordinate
Revolute coordinate
Sistem Gerak
Robot berdasarkan mobilitasnya terbagi dalam dua kelompok:
- Robot yang dapat dioperasikan pada lingkungan yang tetap dengan pergerakan yang dirancang tetap dan tertentu ( sebagia robot industri/ stationary robot)
- Robot bergerak secara otonami, memiliki navigasi, dan gerakannya yang tidak tetap tergantung dari medan jelajah (dikenal dengan mobile Robot). Disini mobile robot dapat bergarak menggunakan kaki (leg robot), roda (whell robot) dan tank.
stationary robot biasanya berwujut manipulator lengan yang menyerupai fungsi dari lengan manusia. seperti pada salah satu robot pada industri perakitan mobil. jenis pola gerakan lengan robot antra lain polar coordinate, cylindrical coordinate, cartesian coordinate dan revolute coordinate.

Polar coordinate memiliki pola jangkauan setengah bola, dengan titik pergeseran sejauh jari-jari bola.
yang mana r=panjang lengan Dan θ=sudut
Cartesian coordinate titik2 yang dijangkau oleh lengan dengan pola yang menyerupai kotak dan tidak dapat melakukan rotasi
cylindrical coordinate lengan robot terpasang pada sistem yang menyerupai elevator, bergerak naik turun, dapat berotasi, menjangkau tempat dengan berbagai variasi ketinggian.
Revolute coordinate mendekati model lengan pada manusia, dapat berotasi, bergerak naik turun, fleksibel mencapai titik yang dikehendaki.
Langganan:
Posting Komentar (Atom)


No Response to "Mekanik Robot"
Komentar Anda